Last modified: 2025-11-12 14:01:58
< 2025-11-04 2025-11-10 >I want to make an orrery that has the earth at the centre, with our house at the very top (so the earth is inclined), and the sun and the moon rotate around.
It would be controlled electronically so that the sun and the moon are always at their true position relative to the house.
I don't think I need anything more than the sun and the moon, keep it simple.
But I potentially want the moon to have a black half and a white half, and always orient the white half towards the sun.
There are hardly any orreries out there that don't have the sun at the centre.
I found this clip of a geocentric orrery: https://www.youtube.com/watch?v=XFPHEXACdSc - but it still has the earth rotating in the centre instead of fixed in place as we experience it.
It would be cool if the centre of the device was a sphere representing the earth, but with an oversized model of our house at the very top. So the sphere can be decorated to suggest the earth, and the house is just thousands of times bigger than it should be. Potentially you can hide the electronics inside the sphere, it just needs to have gaps for the arms to pass through to support the sun and moon.
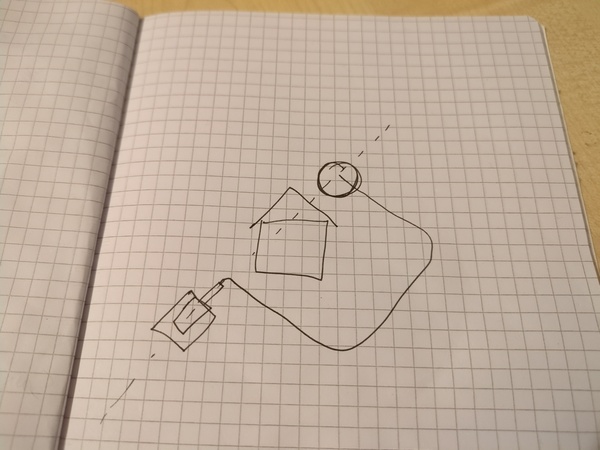
How much do the sun and moon positions deviate from a plane? Would it be OK to move them around a single axis or do we need to also tilt the axis back and forth? That would mean needing much larger gaps in the sphere. Also, actually, the axis will pass through the house! Do we want gaps in the house? Or do we want the axis to exit out the back and have cranked arms that put the sun/moon in the correct place? Like this:
Over a year the sun's declination ranges from -23.4° to +23.4°, so a range of 46.8°, I think that is large enough that I would want to model it, so the sun wants at least 2 axes.
Apparently the moon's declination range can be even larger, +/-18.3° to +/-28.6° depending on the "nodal phase", whatever that is.
It is possible that we can say that being up to 28° off is actually acceptable, we can at least have the direction to the sun and moon correct, even if declination has error.
The arms should potentially be counterweighted so that they stay in position while unpowered, so we can just power the thing up periodically to update position and then switch it off. Like maybe it comes on for a few seconds every 5 minutes, instead of continuously running the motors or whatever.
The motors will either want to have positional feedback that works while switched off, or else will want to resist moving when bumped, if we're going to switch them off. Maybe we could have a rotary encoder that we don't turn off, but we turn off power to the stepper, so we can tell if it gets bumped and then reposition it?
I think we want:
Stepper motors normally have 200 steps per rev, which to be honest may be good enough for this without any reduction.
ChatGPT suggests using an "absolute magnetic encoder" for positional encoding, that sounds good, no index pulse required.
Alternatively https://www.amazon.co.uk/DS04-NFC-continuously-rotating-continuous-consumption/dp/B07TTMKLRW this is a servo motor that has continuous rotation and lets you choose the rotation direction by the pulse duration?
I don't need 2 axes per body. I can have one axis for the tilt of the ecliptic, and mount the motors for both the sun and the moon on this ecliptic-tilted plate, and then have it move both the sun and the moon in a single axis from this plate.
The moon's deviation from the ecliptic is up to about 5.1° so that is a super low error.
< 2025-11-04 2025-11-10 >