
Last modified: 2025-11-13 21:19:11
< 2025-11-11 2025-11-14 >I've tidied up the garage, it doesn't take very long and instantly makes the space more inviting for working on things. I should keep it tidier more often.
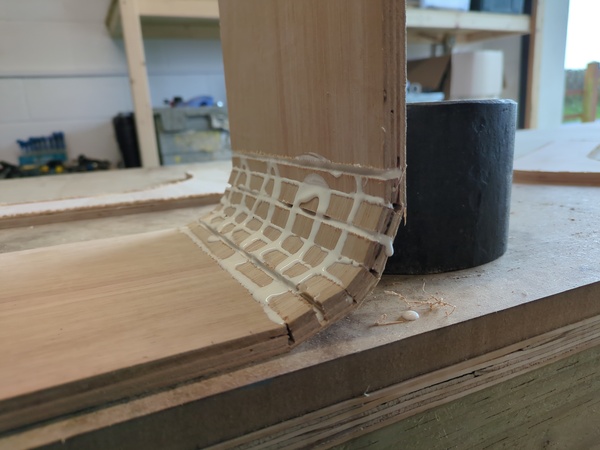
I have had a go at "kerf bending", it hasn't gone well:
I used the calculator and left a 3mm thickness (as per the default) and I could tell it wouldn't bend without snapping. So then I cut all the grooves deeper but it still felt like it was going to snap, but I forced it, and then it snapped. Bugger.
I think the grain direction of the outer ply needs to be the other way, which I didn't think of until after I snapped it, but at any rate I didn't have enough length in the other direction so it had to be this way anyway, or else having the top/front surface of the bonnet made out of 2 pieces.
Since the wood had snapped anyway I continued bending it to see what would happen.
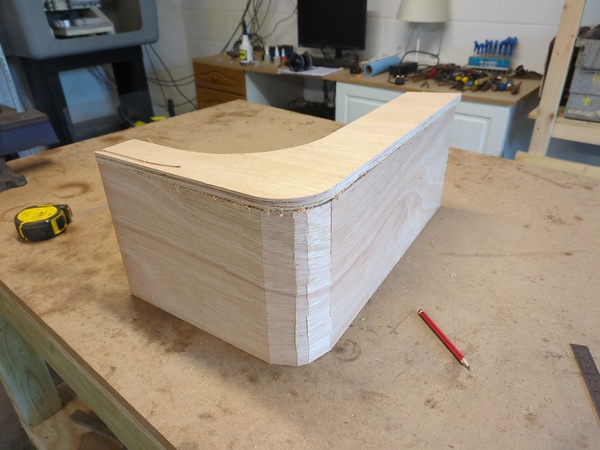
Actually doesn't look too awful? With a bit of sanding I might be able to salvage this?
I can live with this. I glued up the inside to make it a bit stronger:
Once that glue has set I am going to attach battens to the insides of this bent piece, and then attach the sides to the battens, and then it should be strong enough to hold its shape and I can have a go at sanding out the lumps.
In the worst case I buy more plywood and try again.
Let's say we're using ordinary stepper motors for the sun/moon axes, with absolute encoders to work out the position. That will give 1.8° steps, which at a 200mm radius is about 6mm steps. That may be a bit too much of a jump? Or maybe we're OK with it, it make the movement a discrete event to pay attention to? Or alternatively we gear them down. If the absolute encoder goes on the shaft after the gearing, instead of on the motor, then that still works.
ChatGPT says you can stop the stepper motors from drawing current by using the "SLEEP" pin on the stepper driver.
And then the next question is what kind of motor am I going to use to do the +/- 24° axis for the earth rotation axis inclination, or whatever you'd call it. An RC servo motor would in principle be fine, but I don't know how much power they draw or whether I'd need to leave it powered up permanently or whether there is an easy way to power it off or if it would be noisy and jittery.
Also I don't know if the idea about tying the sun and moon together with a retracting lanyard, to make the lit side of the moon face the sun, will actually work.
I don't think there is anywhere you can put it that won't catch on some other part of the frame or mechanism if the sun does an entire lap while the moon stays still, for example.
Oh! ChatGPT points out you can use microstepping to fix the chunkiness of the stepper motor steps. Although I think that may not allow you to power off the motor in between steps.
Maybe I just tune the driver current way down and leave it powered on all the time. It doesn't even matter if the current is so low that it sometimes misses steps, because we have the encoder.
I guess I can experiment with RC servos now and see if they're going to be noisy.
So I want an Arduino program that just slowly ticks around from -24° to +24°, and wire it up to different servos and see which one is quietest.

Contenders are: SG90 micro servo, MG 996R normal-size (?) servo, and KM1203MD micro servo. I recall the latter was quite expensive, I was planning to use it for an antweight combat robot.
Now I get to try out the new Arduino IDE. Although I may end up driving this stuff directly from a Raspberry Pi instead, unsure.
Would I want to get time-of-day from wifi or GPS? Or something else? GPS probably unnecessary hassle, and won't work very well indoors anyway. So probably wifi. So I will either want a microcontroller with wifi on board, like an ESP32, or else a Raspberry Pi. I will want an easy way to set the wifi credentials either way, maybe I could have the ESP32 listen on USB serial and prompt you for them?
I'm basically using the "Sweep" example sketch for Arduino.
The SG90 makes a quiet buzzing noise every time it moves but I'd say perfectly acceptable. Although it seems to have quite a hysteresis.
The MG996R constantly buzzes, very poor. I'm surprised it is worse than the SG90.
The KM1203MD also constantly buzzes.
OK, I think I know what the problem is, I think they are browning-out the power supply. The red power light on the Arduino keeps dimming.
I've switched from the "5V" pin to the "VIN" pin. The KM1203MD is still very buzzy. It seems like every time I ask it to move by 1° it massively overshoots and then oscillates as it overshoots back the other way.
The MG996R is also still buzzy.
SG90 is the winner, who would have guessed!
So then the question is: is the SG90 accurate enough to satisfy me, or do I want to use a stepper for this axis as well? I think the hysteresis is about 4°. In the sense that when the direction reverses, nothing happens and then all of a sudden it jumps 4° at once. Possibly I could gear down the servo output as well? If it has a range of 180° then a 4:1 ratio would be slightly too much, but for example 35:10 teeth should be fine, and then the hysteresis would be just over 1°, and most steps would be about 0.3°. Maybe that's fine, and it saves faffing about with another stepper motor.
So I think we're saying:
And then the rest is just mechanical design?
The frame support needs to loop around the path that the sun/moon will take, and support the servo that drives the tilting plate, and the wires, and a model of the earth/house to sit at the top.
The software needs to connect to wifi, periodically look at the current time, calculate the current angles, and update all of the positions.
ChatGPT suggested adding a preload to the tilting plate (e.g. spring) so that it is always driven to one side of the backlash, to reduce the jump on direction reversal. Maybe unnecessary.
The moon and sun want to be rotating on a path that is centered on the tilting-plate axis. And the house wants to be small and as close as possible to the tilting-plate axis, so that the size/position of it doesn't throw off the relative directions to the sun/moon.
And what about making the moon face towards the sun?
It might be nice to be able to rotate the platform on its stand, so that you can position the stand against the wall and rotate it into alignment with North/South/East/West.
Proposed packaging for the steppers/encoders/gears:

That has provision for coaxial shafts, with micro bearings in the upper gear to bear on the inner shaft, like on the stepper motor clocks. The 3rd large gear is for driving the encoder for the outer shaft.
I don't yet know whether I want to orient the steppers horizontally (with the extra encoder sticking up/down), or vertically (with the extra encoder sticking out horizontally). I guess if the motors are horizontal and the encoder sticks down then we get the axis closest to the top.
The shafts will obviously need spacers etc. but I'll make those at the end.
< 2025-11-11 2025-11-14 >