Last modified: 2023-12-29 21:17:55
< 2023-12-28 2023-12-30 >Here's a simple idea for an escapement: take the escape wheel and impulse roller from a chronometer escapement, but throw away the rest of it.
The escape wheel will be locked against the roller table under "frictional rest" for most of the cycle, and will provide impulse, in one direction only, once the balance wheel swings far enough for the tooth to enter the impulse surface.
Obviously it won't perform as well as an actual chronometer escapement, but it is substantially easier to make. Hopefully it would perform better than a verge escapement, in addition to actually being easier to make than a verge escapement.
You'd want the balance spring set up so that it always pulls the balance wheel in the direction of the escape wheel. So the escape wheel would push it one way and the spring would pull it back.
You wouldn't be able to get any more energy in the balance wheel than the amount that is put into it in a single impulse from the escape wheel, but again this is true of the verge escapement.
It has the same "tripping" issue as a chronometer escapement, in that if the balance wheel does a complete turn it will get another impulse.
Example:
one-way-roller-escapement.FCStd
In that example the escaping amplitude is 58 degrees, but this is not directly comparable to the escaping amplitude of the verge escapement, because once it escapes it doesn't immediately get an impulse back in the other direction - it has to be slowed down and reversed by the spring alone (modulo the frictional rest).
Puting more teeth on the escape wheel is a good idea because it reduces the ratio required of the rest of the train.
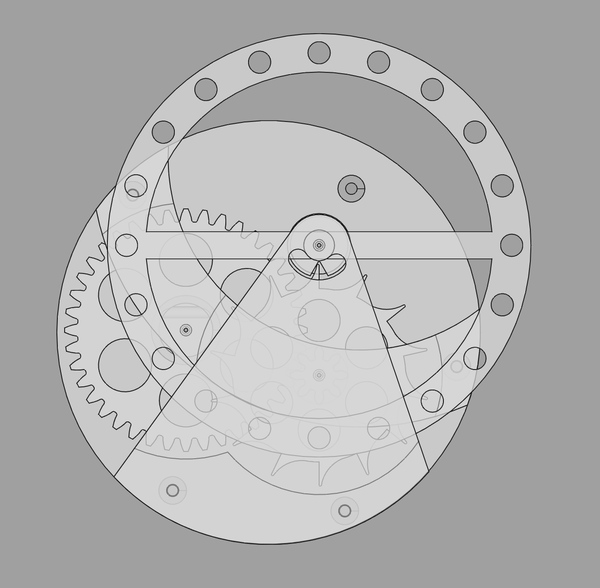
The maximum diameter for the escape wheel in my watch (thin-barrel-direct-drive.FCStd) is 22mm:
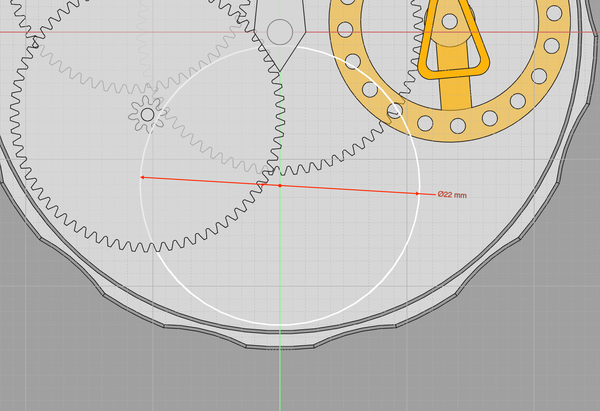
To stay clear of the central shaft and the outside of the movement.
I don't like how much "drop" there is:
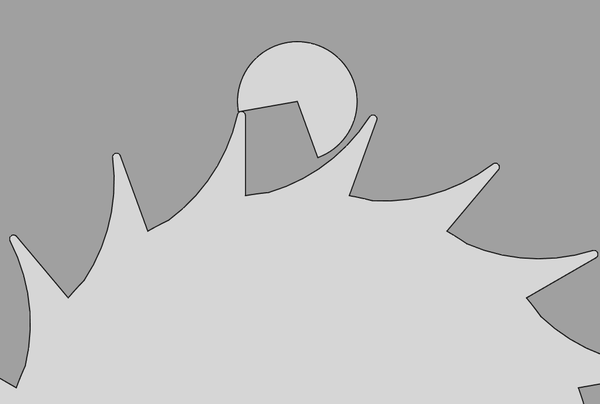
You can see with a roller like this it wastes about 50% of the escape wheel movement on dropping the tooth on to the pallet face.
Making the angle on the roller tighter means we waste less on the drop.
I made a little animation:
The speeds aren't very accurate, and the loop isn't very good, but it shows the idea. It also shows that the recoil "gives back" some of the drop.
I don't think the recoil can ever push the escape wheel tooth onto frictional rest on the "other" side of the impulse pallet, because I think there can't ever be enough energy in the balance wheel to swing past the point it was initially pushed from. Right?
Here's CAD of a 3d-printable model:
Just been thinking about this a bit more, I think the escape wheel and the roller should have an involute gear profile. The roller would just have the "gap" for one tooth to go in, and the escape wheel would only have maybe every second or third tooth, but that way they would roll against each other nicely instead of sliding.
This is a starting point:
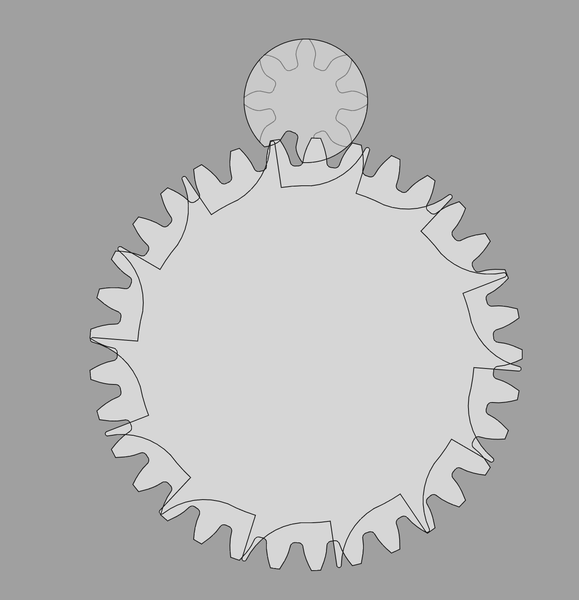
The roller is just one tooth gap from an 8-leaf module 0.55 pinion.
To match the previous version the escape wheel needs 14 teeth, but to make the rest of the geometry line up it needs 33 teeth. So we can't simply omit every nth tooth to get the right shape. But there's no reason we can't draw a copy of a single tooth and PolarPattern it 14 times.
Like this:
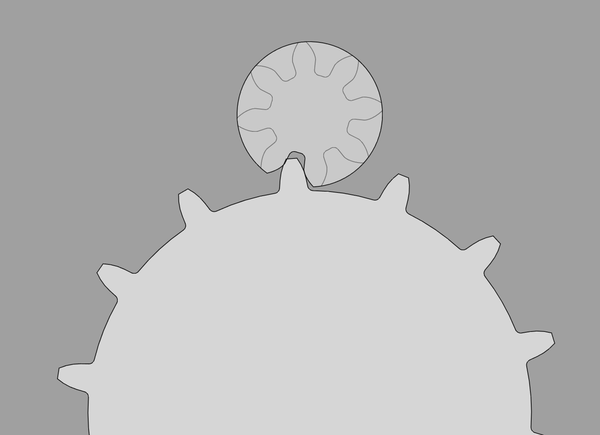
Actually that doesn't quite work because the tooth immediately after the "active" tooth interferes with the roller.
Meh, I can't be bothered with this. Changes I'd want to make are:
Anyway, my progress so far is in one-way-roller-escapement-involute.FCStd.
I've put this together:
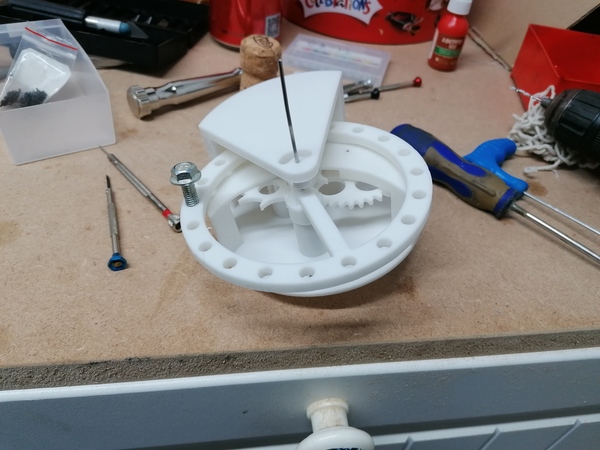
It's pretty janky, very poor pivots, but first impression is that it looks like it will work! I don't have any M6 bolts short enough to fit under the balance cock (yawn), so I have to hold it upside down and press the barrel gear with my finger, but it runs really easily, as expected, despite the crude construction. Nice and reliable.
It seems to run faster when more torque is applied, as you'd probably expect, but would be good to quantify it.
I just realised it actually might be able to swing back past the escape wheel and end up in frictional rest on the "other" side, because on the reverse swing it only needs to overcome the energy of the drop, whereas on the forward swing it gains the energy of the impulse.
If we could make the drop zero (probably impossible) then the reverse swing would lose 0 energy as it crosses the dead point, other than what it always loses due to friction.
Also there are 2 drops, I need better words for them. The one I've been referring to is when the escape wheel tooth drops onto the pallet face to provide impulse, but there's also another drop when the next escape wheel tooth drops into frictional rest.
Tomorrow I want to:
I realised that in my mucking about in CAD I was trying to find a high "escaping amplitude", on the basis that this would give the balance wheel a high amplitude. But that is actually a bad idea, I want the escape wheel to be providing impulse for the smallest angle possible, so as not to interfere with the isochronism.
We want:
So once I've took some measurements from the existing model, it may be interesting to make an alternative escape wheel and/or roller, to reduce the angle at which impulse is being provided, and see how it compares.
< 2023-12-28 2023-12-30 >