Last modified: 2023-09-18 09:02:13
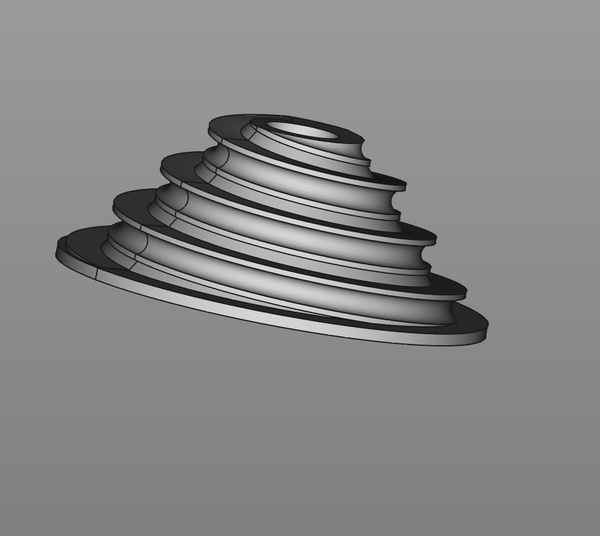
< 2023-09-06 2023-09-08 >I designed a quick fusee in FreeCAD and printed it.
The radius to the centre of the string varies from about 20mm at the largest to 5mm at the smallest.
So when I run it with a weight, the torque will vary by a factor of maybe 4. I don't yet know how by what factor the mainspring will vary its output torque.
Plan:
I came across this video: https://www.youtube.com/watch?v=7lbGJr0NaHw
The point is that the escape wheel presses against the balance wheel via a spring, which means the force is almost completely constant regardless of how much torque is on the escape wheel. Pretty clever.
Actually it was almost completely unnecessary to make the fusee because I could just run it with 4x as much weight and see how the tick rate changes. Never mind.
Oh, I remember. The issue before was that we effectively had a fusee anyway because the spring got wrapped around over the top of itself.
https://www.youtube.com/watch?v=HvCGK8nU7pY
When the torque dropped by about 4x, the tick rate dropped by about 7%. That's 7x our inaccuracy budget, so if the mainspring torque drops by 4x then we would need some sort of fusee, which would make this escapement a non-starter.
It would be good to find out how much the torque in a typical mainspring drops.
This picture from Wikipedia shows a historical drawing of a fusee: https://en.wikipedia.org/wiki/Fusee_(horology)#/media/File:Fusee_With_Cord.png
And it looks as if the fusee diameter varies by about a factor of 2 over its length. So if our tick rate were linear in torque, that would mean a change of 3.5% over the course of the spring unwinding. Still not good enough.
I think the plan would be to ensure that the torque from the mainspring is as constant as possible via spring design (and/or stop-works if necessary) rather than a fusee.
I think we could probably tolerate a 50% variance in torque and stay within the inaccuracy budget of 1%.
The period of a balance wheel is 2 * pi * sqrt(I/K) where I is the moment of inertia and K is the
spring constant.
Assume the spring constant stays constant with temperature (would it go up or down as it gets hotter?), what kind of temperature change would be required to change the period of a brass balance wheel by 1%?
Say that the balance wheel is a hollow cylinder, so I = M*R^2. With M and K taken to be constants,
the period is proportional to the radius. So what temperature change is required to change the radius
by 1%?
The coefficient of thermal expansion of brass is 20 * 10^-6 per deg. C, so to get 10^-2 we'd need a change of 500 deg. C?
If the watch experiences temperature swings of 500 degrees C, it will have bigger problems than inaccuracy.
< 2023-09-06 2023-09-08 >#/media/File:Fusee_With_Cord.png){kind=link}