Last modified: 2023-09-22 10:37:57
< 2023-09-05 2023-09-07 >I was at Ruari's today working on his CNC machine so haven't done any work on the watch project. We made a spoilboard, fixed a rattling panel, and fixed the Z-axis motor coupling.
I should 3d print a fusee for the escapement prototype, so that I can see how it really performs under varying torque.
I also need to work out how much my actual torque is going to vary over the life of the spring. Considering that friction losses will be broadly constant (maybe?), the torque remaining by the time the drive reaches the escape wheel will have dropped by a higher proportion than that at the mainspring. So if the watch is going to work without a fusee, the change in torque at the output of the mainspring needs to be considerably less than the change that would be required to throw it off by 1%.
Apart from that, I'm going to spend half an hour playing with the escapement simulator to try and find a more stable system. It would be good to have a way to plot the amount of energy lost to friction losses.
From watching the video, it actually performs much better in real life than in the simulation. The simulation shows it hesitating as the receiving pallet slides too far up the face of the tooth, but this doesn't happen in real life. Why? I think because the amplitude is lower. With higher amplitude it can almost "over-centre" against the tooth, and then the pressure from the tooth is too close to the radial of the anchor. It seems to run more smoothly in the sim if I much about with the mass, torque, and spring stiffness to reduce the amplitude.
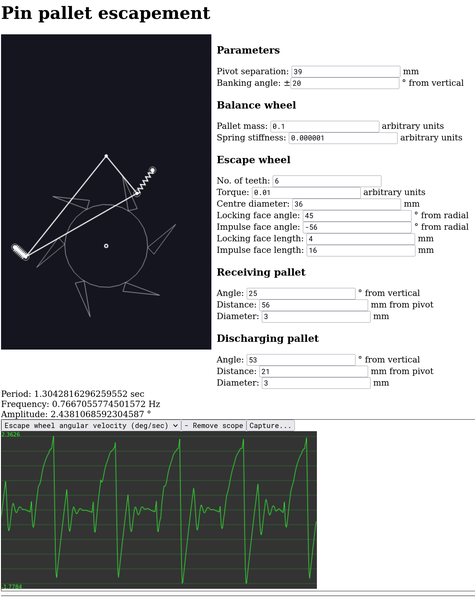
Came up with this interesting configuration:
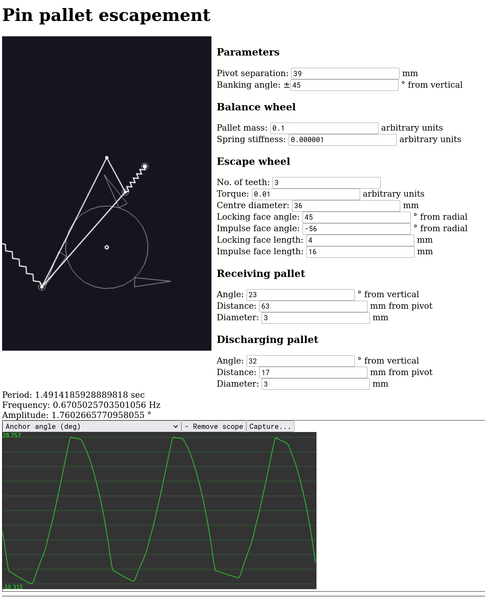
And this version with only 3 escape wheel teeth:
Next stuff to work on:
Ideas for sources of springs suitable for the mainspring: