Last modified: 2024-12-01 12:36:02
< 2024-11-29 2024-12-01 >So the plan today is to make a first attempt at a Korfhage-style remontoire.
See http://www.my-time-machines.net/korfhage_remontore.htm
But I'll put it directly on the shaft with the escape wheel, instead of on a shaft that is then geared to the escape wheel, because I don't see the use in having the extra stage of gear meshing in between.
So I need to "split" my escape wheel shaft between the pinion and the escape wheel, and put the bevel gears in between, and also have another shaft geared off the pinion side, spinning faster, to catch the arm on the remontoire.
If I want it to wind up every quarter of a turn, and the arm will catch the remontoire after a quarter of a turn, then the arm needs to spin 4x as fast.
The first question is how do you make bevel gears in FreeCAD? One possibility would be to make 2 PartDesign InvoluteGear profiles, shift one up by a few mm, and make the upper one have smaller modulus, and loft between them?
Another possibility is to use the Gears workbench, but I tried to install it and it hasn't worked.
Another possibility is to pad up a PartDesign InvoluteGear with a draft angle.
I think the taper angle thing is not right. I don't want a flat gear that gets narrower as it goes upwards, I want it to stay the same size, but project on a line that goes at 22.5 degrees.
So maybe I try that? Make an InvoluteGear, pad it, then make a datum line from the root of one of the teeth, upwards at 22.5 degrees from vertical, leaning towards the origin. Then draw the profile of the tooth, pocket it along the datum line, PolarPattern around Z?
No, the tooth profile will be skewed.
OK, so I do the same thing, but start with a flat disc instead of a padded InvoluteGear, and to reference the tooth shape I make a flat InvoluteGear and tilt it by 22.5 degrees.
Scratch all that. I uninstalled and reinstalled the Gears workbench and it is working, so I'll use that.
Actually, update: let's make it rewind every eighth of a turn instead of every quarter.
cos(45 deg.) = 0.71, cos(22.5 deg.) = 0.92
If it rewinds a quarter of a turn at a time (from -45 deg. to +45 deg.), the torque will vary by a lot more than if it only rewinds an eighth at a time.
It might be a better idea to make it rewind by some proportion that doesn't evenly divide the circle, by the "hunting tooth" principle.
OK, I have this:
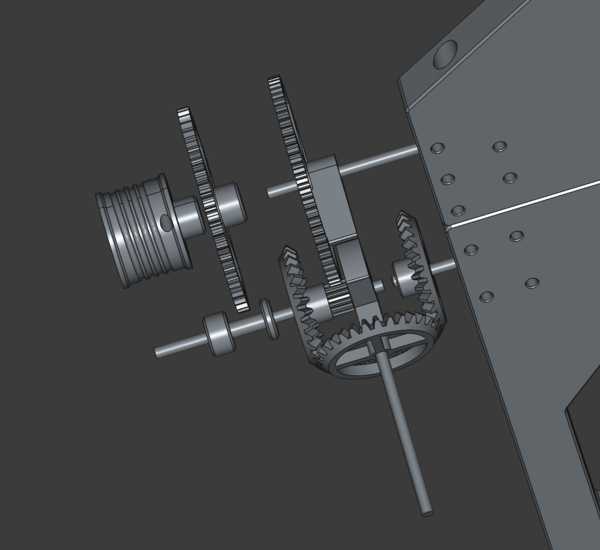
So the weight will hang off the existing ratcheting drum, and turn the existing big gear that is on the same shaft. That then turns the existing roller lantern pinion, which previously was connected directly to the escape wheel shaft.
The roller lantern pinion turns its shaft, which turns the first bevel gear, which both raises up the middle bevel gear, and turns the adjacent shaft 8x as fast. So after an eighth of a turn, the arm on the adjacent shaft hits the protrusion from the middle bevel gear, which stops it from going any further.
The middle bevel gear is trying to fall down under its weight, which makes the final bevel gear turn, which turns the escape wheel. Once the escape wheel has done an eighth of a turn, the middle bevel gear will have fallen far enough for the arm to unlock, which allows the drive weight to start falling again, until the adjacent shaft has done another complete turn and the arm is again locked against the protrusion of the middle bevel gear, etc. until you run out of string.
I have the drive weight and the adjacent shaft on the same centre line so that I can use the same physical shaft for both of them, and just let the adjacent gear spin freely on the shaft, to simplify the frame.
So now I just need a frame to hold it all, and maybe something to allow me to attach weights to the middle bevel gear's shaft.
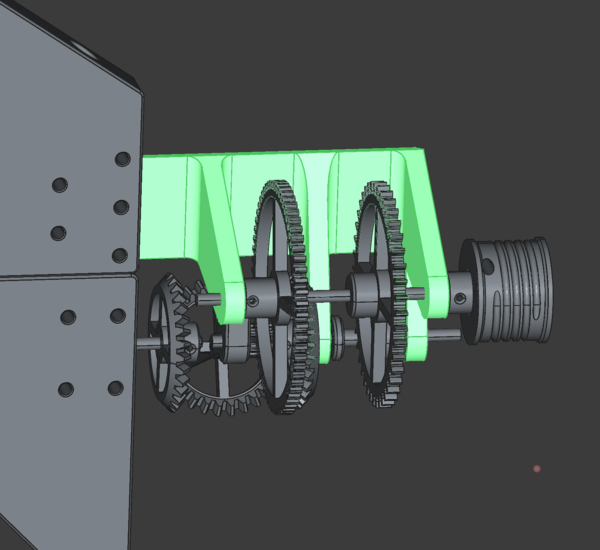
???
Not very elegant, but it might do for now. I really need to build a metal frame, but I think I prefer the flexibility of bolting 3d-printed parts together for now.
I'm just going to print all of these parts and see how I get on.
It'll be 2 print jobs of 2 hours each. I'm going to have a break now during the first print job, and capture a "control" trace during the second one. Then fit the remontoire and see if it works & what difference it makes.
Not sure why the amplitude was rising over time. Maybe the balance pivots are too tight and it was freeing up by wearing them away? I won't mess with them though. To compare like-for-like I'll try to leave it as much the same as possible when fitting the remontoire.
Darn, I have to cut some length off the escape wheel shaft, which means I'm going to have to much about re-depthing the escapement and re-aligning the escape wheel. Never mind.
I need the escape wheel shaft to be about 172 mm, the remontoire driving shaft to be about 100 mm, the remontoire adjacent shaft to be about 140mm, and some arbitrary length for the weight to hang off the side of the remontoire.
My existing winding drum shaft is almost exactly 172 mm, so I'll use that for the new escape wheel shaft.
Oops, I realised it's not going to work.
The 8:1 gear reduction is the wrong way around, so the remontoire will wind up for 8 turns before stopping, instead of one eighth of a turn. I can put it together but manually stop and release the remontoire just to see if there are any other issues.
Also I'm out of PAHT-CF shaft collars.
Whoa, actually... do you even need the intermittent rewinding at all?? What if you just have a "stop" for the weight, and let the train continuously try to wind it up? It will always be pushing down on the escapement, and will always be raised up by the train. It's like a remontoire that rewinds on every single tick. What is the downside?
Anyway, I have put it all together, minus the "adjacent gear" with its remontoire-catching arm.
There is too much friction in all of my pivots and gear meshing for 3x M20 nuts to be able to wind it up, but if I wind it up by hand it seems to work.
Oh! The downside of the "just continuously unlock the remontoire" idea is that while the remontoire weight is locked, the train can transmit torque directly through the middle bevel gear to the escapement, so it no longer detaches the escapement from the train. OK.
I have freed up some of the tight spots and now it is just about running with 3x M20 nuts plus a small allen key. It doesn't have enough torque to keep the remontoire wound up, but as the weight falls down the torque required to wind it up drops, and then it does wind up, so it is almost working correctly, it just rewinds at a random point instead of every eighth of an escape wheel turn.
It is spending some portion of its time with the middle bevel gear wedged against the frame, so transmitting torque directly through the bevel gear to the escapement, but most of the time it is just running off the remontoire weight.
https://www.youtube.com/watch?v=grannxHM4SI

So earlier today, with no remontoire, it ranged over 25 degrees* and about **4.75 ms.
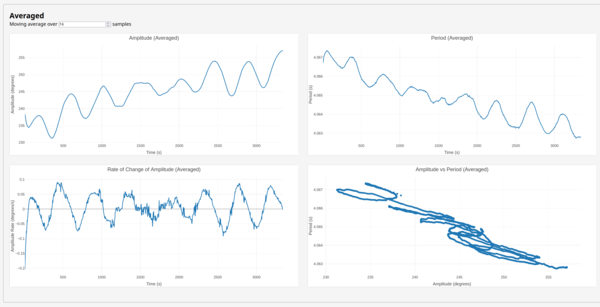
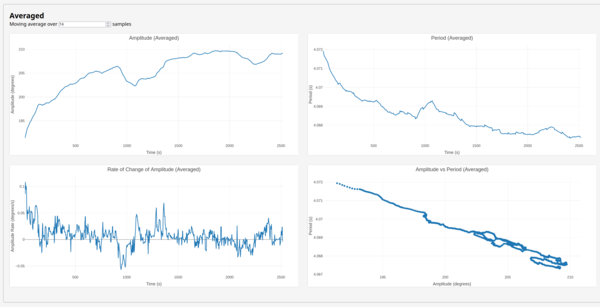
With the extremely crude remontoire, it ranged over about 18 degrees and about 4.75 ms. But some of that could be dismissed as "ramp-up", if we only look at the data from t=500s onwards, it is 7 degrees and 1.75 ms, which is a big improvement.
And the period-amplitude relationship appears to be a lot tighter than it was before. Perhaps it is just that the rate of change of amplitude is lower, because the hunting amplitude problem is basically gone.
There is still a hunting amplitude in the non-averaged data:
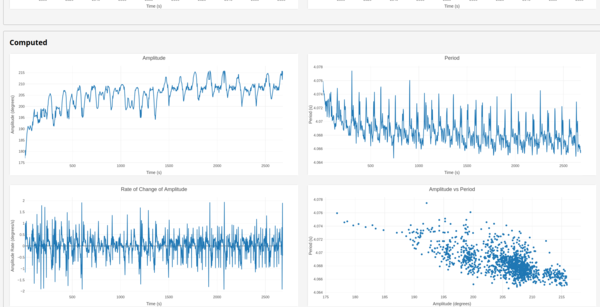
That is because the remontoire weight is falling quite far down before getting rewound, and isn't getting properly decoupled from the drive weight. I think if this were actually working as intended it would be even better.
Issues are:
I got Cursor to do this, and recorded a demo video to impress jrn.
https://www.youtube.com/watch?v=_keFJmKWXfM
Now trying with 3x M12 bolts on the balance wheel. Adding the first 2 bolts took the period up from ~2 seconds to ~4 seconds, so I think a 3rd should make it ~5 seconds? If you assume a marginal bolt adds 1 second to the period?
Seems to be about 4.75 seconds.
I've added some random plastic parts to the remontoire as a bit of extra torque for the escapement, and added a smaller M20 nut for extra drive weight.
It's now swinging far enough to actually experience recoil from the varying resting surface.
One cool thing about the remontoire is the long arm sticking out of it gives a very amplified view of the motion of the escape wheel.
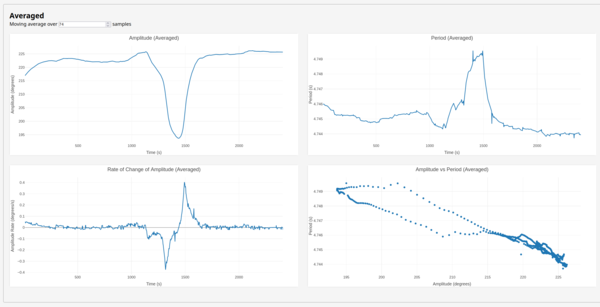
I messed it up by mucking about with the remontoire around t=1200s, but apart from that it stayed within about 2 ms period and about 8 degrees amplitude.