Last modified: 2024-12-12 18:34:50
< 2024-12-11 2024-12-13 >Let's try and solve this then.
Strategies are:
I'll try to get Cursor to port the Adafruit lib.
https://github.com/adafruit/Adafruit_CircuitPython_BMP3XX
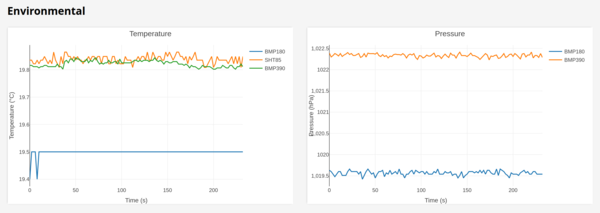
After a few attempts at making the calibration code match the Python it seems to have got it working, although the pressure value is quite different from what the BMP180 is saying. (1020 hPa on BMP180 vs 1015 hPa on BMP390).
And it is not giving the same answers as the Python code. So I think it is definitely wrong.
Just a small blunder in applying the calibration data. I think it is close enough now.
Great success, got it working:
Yes it's stupid that the colours aren't consistent.
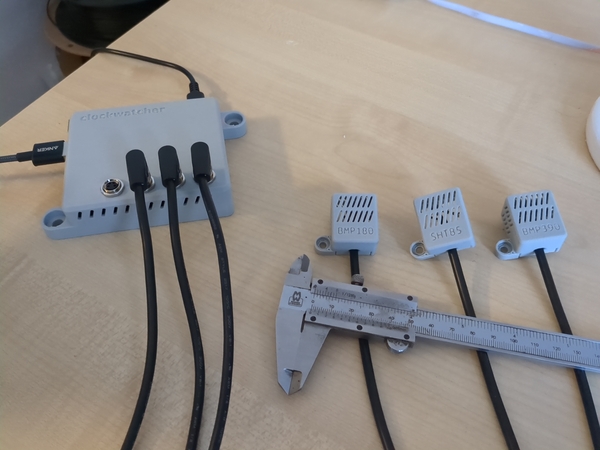
I can probably just make a generic box that clamps around the cable and has enough room inside for all of the sensors, and use the same box for each one.
3d-printed coefficients of friction study
The plan here is there will be a bit of a frame with a pulley on it and integrated cup. You put the lower test sample in the cup. You put the upper test sample on top, and put a second cup over the top of the upper sample. The second cup has a string on it which you loop over the pulley. You put some weights on top of the second cup. You put weights on the string until the weight on the string is enough to pull the upper sample away from the lower sample.
The ratio of the weights is the coefficient of friction, if you make sure to include the weight of the test sample itself, and the cup, etc.
Repeat it several times with several amounts of weight to plot a distribution of likely values.
Make the cups octagonal so that they can test parallel, pependicular, and 45 degrees, just by rotating the samples.
For finely metering the weight I plan to use something like little buckets that can take M6 nuts or similar?
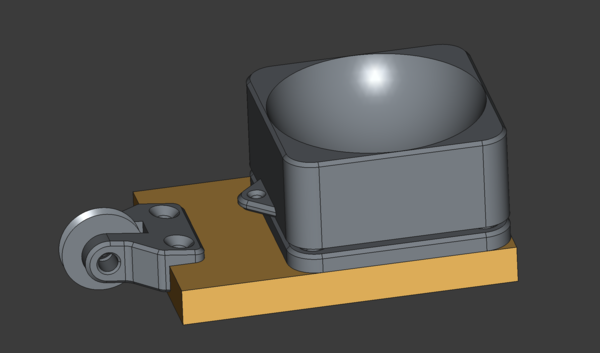
Base plate is a piece of wood, then the lower "cup" screws down to it, and the pulley holder screws down to it. The pulley has one of the small bearings, and an M5 screw to hold it in place. The upper cup (facing down) has a bowl on the top for putting weights in.
Just need a bucket for the weights on the string. And maybe a "stop" to prevent the weights from moving too far once the friction is broken. The stop can just be a couple of blocks of wood.
This looks good:

That's about in equilibrium, with no test sample installed. The upper cup is sitting on the slightly-raised screw heads.
The weight of the upper cup including nuts is 46.3 g, and the empty bucket, including
wire, is 7.6 g. So the coefficient of friction between the PLA and the steel
screw heads is about 7.6 / 46.3 = 0.16.
An unexpected benefit of this design is that it is easy to take the bucket, string, and upper cup off the stand and weigh the individual ends on the scales separately.
I think this will work well. Just need some test samples now. Two of each material I have available.
Standing vertically, is a 38 minute print for 2 samples. I want them standing vertically because I want to test layer lines against layer lines. It might have been an idea to make the test samples quite a bit smaller. And in fact I could still do that if I make a large octagon with a hole in the middle for a smaller one.
I need to write down a methodology for how I decide when it's at the equilibrium point.
I printed some test samples in the white eSun PLA+.
With the top layer lines perpendicular to direction of motion and bottom layer lines parallel, coefficient of friction is 0.13.
With the top sample rotated so that the layer lines are also parallel to motion, it is maybe 0.4 if you make it so that the layer lines perfectly line up and fit together?
More thorough methodology needed, and a wider range of weights in the bucket. And make sure the desk is level!
Methodology is something like: