Last modified: 2024-01-16 20:18:20
< 2024-01-15 2024-01-17 >I woke up to find that email was not working. I logged into the recovery console and there were some errors about network devices not being ready. I noticed that it shutdown unexpectedly at about 19:40 yesterday and came back at about 21:04 yesterday. Why was it down for 1h25? I also noticed that the host key on the recovery console had changed, which suggests it was migrated to a new VM host.
I texted support, rebooted the machine, eventually realised that actually networking was fine (was it fine all along or did it only just start working?) and it was Docker that was broken.
Docker was getting errors like:
overlayfs: unrecognized mount option "context="system_u:object_r:svirt_sandbox_file_t:s0:c177" or missing value
I don't know what the problem is.
I eventually solved it by wiping out /var/lib/docker, reinstalling Docker, and recreating everything with docker-compose.
My best guess is that the VM host had a failure, so the VM was migrated to a different host, and something about
/var/lib/docker didn't survive the migration.
I've sent a support ticket to find out what happened.
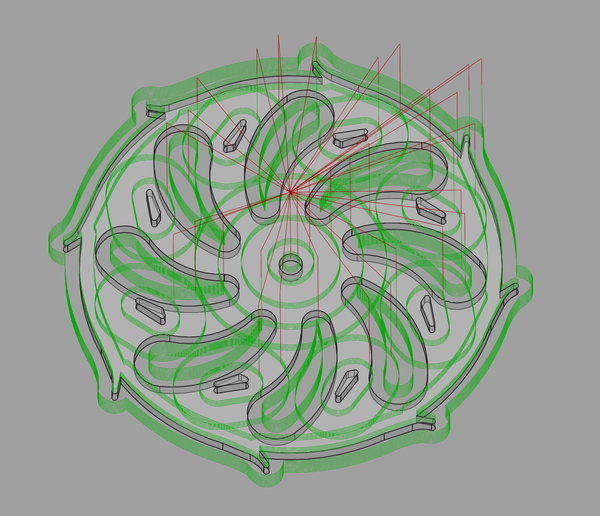
Here's my CAM:
I'm not sure it's going to work because of the large radius it will leave on the trailing edge of the locking tooth.
Needs to be made from a rod at least 16mm diameter. Wants a 0.8mm hole in the centre.

Looking good. Now the usual: part off, superglue, face to length.

I held it to the mainplate with the bore lined up with its pivot, and a locking tooth towards the balance wheel shaft. It looks like the depthing is too far apart. I think the escape wheel may be able to slip past the locking roller. Need to make a shaft to try it out though. 0.8mm diameter for the main bit, with 0.4mm pivots.
Some thoughts I had while using UGS:
I want a way to view the state of the probe even if I'm "not probing", so that I can do probing operations manually. And obviously a way to make probe contact stop jogging.
I want to be able to tab-complete filenames.
I want G-code files to be loaded into memory so that changes on disk can't have any effect.
I want the cycle time calculation, but I want it better than UGS. I want to pre-process the G-code file to see feed rates and movement lengths, and I also want to take into account the feed override.
I want a way to program custom macro keys for temporary overrides. So make it so my override is active as long as some key is held down, and goes back to what it was once I let go. Or if that's too much trouble, toggle it on the key press. But it needs to be easy to undo the effect, even if I didn't think of that when I created the macro.
I want the 2d plot to show the bounding box coordinates. Or maybe just basic grid lines and graduated axes.
I want it to auto-detect a USB stick insertion and suggest loading the most recent changed file. The file loading area could also show G-code previews, and estimated cycle times.
I never want G-code plot rendering or cycle time estimation to block the UI. There should be a dedicated worker thread (or more than one?) that is calculating those things, and the rest of the UI works without them, with no significant lag.
I was thinking that it might be convenient to make a little Grbl-like protocol to let arbitrary homemade peripherals interact with the G-code sender UI. There are 2 possible ways this could be driven:
I expect the second option is more convenient, as long as it has enough power to let a single input kick off arbitrarily-many actions.
I've made a tiny start on a Gio user interface. Plans for tomorrow are: